



")




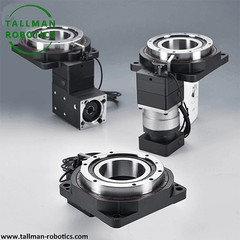
Hollow Rotary Tables yɛ mfiri a ɛyɛ pɛpɛɛpɛ a ɛkorɔn-a wɔde di dwuma titiriw ma gyinabea ne nea wɔde fa rotational motion. Wɔn ade titiriw ne sɛ ɛwɔ through hollow structure wɔ rotating platform no mfinimfini, enti wɔtoo din "hollow" rotating platform. Wɔde Hollow Rotary Tables di dwuma kɛse wɔ mmeae te sɛ mfiri a wɔde yɛ adwuma, mfiri a wɔde yɛ nneɛma pɛpɛɛpɛ, robɔt mfiridwuma, nnuruyɛ mfiri, ne nea ɛkeka ho, a ɛfata titiriw ma tebea horow a ɛsɛ sɛ wɔde nhama, nsu afiri, anaa nneɛma a wɔde yɛ adwuma fa mfinimfini a ɛkyinkyini no mu.
Dɛnyɛnhyehyɛe titiriw ne adwumayɛ nnyinasosɛm a ɛwɔ hollow rotating platforms?
Mpɛn pii no, asɛnka agua a ɛkyinkyini a ɛwɔ tokuru no nhyehyɛe no yɛ nneɛma atitiriw a edidi so yi:
1).Hollow rotating shaft: Tokuru a ɛfa mu wɔ asɛnka agua no mfinimfini (a ne kɛse fi milimita kakraa bi kosi sɛntimita du du a egyina nhwɛso no so), a wɔde di dwuma ma threading, feeding, anaasɛ kwati workpieces, siesie ɔhaw ahorow a cable winding anaasɛ spatial interference wɔ atetesɛm rotating mfiri.
2).Drive System: Akwan a wɔtaa fa so ka drive no bi ne servo motor drive (high-precision ahwehwɛde) anaa stepper motor drive (sikasɛm mu ahwehwɛde), a ɛma platform no di akɔneaba fa transmission components te sɛ gears, harmonic reducers, anaa DD motors (direct drive motors).
3).Positioning feedback device: wɔde encoder (te sɛ incremental anaa absolute encoder) ahyɛ mu, a ɛma real-bere feedback wɔ rotation angle no so, na ɛne control system no yɛ biako de nya closed-loop control, hwɛ hu sɛ positioning no yɛ pɛpɛɛpɛ.
4).Bearing Structure: Platform no ani yɛ high-ahoɔden nneɛma (te sɛ aluminium alloy, cast iron), a ebetumi asoa adwuma asinasin anaa nnwinnade mu duru pɔtee bi. Mfonini ahorow bi boa axial/radial load design.
N’adwuma nnyinasosɛm ne sɛ ɛbɛma afiri a wɔde fa nkrasɛm no afa motor mu, akanyan asɛnka agua no ma ɛkyinkyini atwa mfinimfini kwan no ho ahyia, na bere koro no ara mu no, de nsɛm a wɔde ma ho nhyehyɛe adi dwuma de asiesie gyinabea a ɛtwetwe no wɔ bere ankasa mu, na woanya gyinabea a ɛkorɔn-a ɛyɛ pɛpɛɛpɛ, a ɛkɔ so di akɔneaba anaa ahoɔhare sohwɛ.
Hollow Rotary Tables ne Nneɛma Afoforo a Ɛkyinkyin Ho Ntotoho
|
Asoɛe no su |
Mfaso a ɛwɔ so |
Mfomso ahorow a ɛwom |
Nsɛm tebea horow a ɛfata |
|
Asɛnka agua a ɛkyinkyini a ɛyɛ tokuru |
Pɛpɛɛpɛ a ɛkorɔn, tokuru nhyehyɛe |
Ɛka a ɛkɔ soro |
Gyinabea pɔtee ne through{0}}tokuru ahwehwɛde |
|
Adwumayɛ pon a ɛkyinkyini a ɛyɛ daa |
Ɛho ka sua, nhyehyɛe a ɛnyɛ den |
No hollow design, pɛpɛɛpɛyɛ a ɛba fam |
Nneɛma a wɔde di dwuma pɛpɛɛpɛ a ɛba fam, ɛkyinkyini a ɛnyɛ den |
|
DD motor (a ɛkɔ tẽẽ) . |
Zero clearance,ɔsoro ahoɔden mmuae |
Adesoa tumi a ɛba fam, ɛka kɛse |
Ultra pɛpɛɛpɛ, hann adesoa tebea |
|
Cam a wɔde kyekyɛ nneɛma mu |
Ahoɔhare a ɛkɔ soro, ahoɔden a ɛkorɔn a egyina pintinn |
Fixed indexing ratio, a ɛba fam a ɛyɛ mmerɛw |
Indexing a ɛkyinkyini bere ne bere mu (te sɛ afiri a wɔde hyɛ mu) . |
Dɛn ne su atitiriw ne mfaso horow a ɛwɔ asɛnka agua a ɛkyinkyini a ɛyɛ tokuru so?
1). Nneɛma a wɔde si hɔ pɛpɛɛpɛ a ɛkorɔn
Mpɛn pii no, pon a ɛkyinkyini a ɛwɔ tokuru no gyinabea a wɔde si hɔ mpɛn pii no tumi du ± 0.01mm kosi ± 0.1mm, na anim a wɔde si hɔ no betumi ayɛ nea ɛba fam te sɛ 0.001℃. Ɛfata ma tebea horow a ɛhwehwɛ sɛ wɔde si hɔ pɛpɛɛpɛ, te sɛ nneɛma a wɔboaboa ano pɛpɛɛpɛ ne mfiri a wɔde sɔ hwɛ.
2). Hollow structure nhyehyɛe
Mfinimfini through-tokuru no ma nhama, mframa nhama, optical axes, anaa adwumayɛ nneɛma atenten fa mu, ɛtew mfiridwuma mu ntwitwiridii so na ɛma nnwinnade nhyehyɛe yɛ mmerɛw, titiriw a ɛfata ma "through-tokuru" ahwehwɛde wɔ automated production lines (te sɛ welding robɔt, laser marking mfiri).
3).High rigidity ne adesoa tumi
Adopting precision gears anaa harmonic reducers, a wɔaka abom ne high-ahoɔden nipadua nhyehyɛe, ebetumi agyina axial ne radial adesoa akɛse (nhwɛso ahorow binom tumi du axial adesoa kilogram ɔhaha pii), na tu mmirika pintinn a enni deformation.
4). Mmuae ntɛmntɛm ne akyi hann a ɛba fam
Backlash no sua (mpɛn pii no ennu arc simma 1), na mfiase ne gyinabea mmuae no yɛ ntɛmntɛm, na ɛma ɛfata ma dwumadie a ɛhia high-frequency start stop anaasɛ dynamic trajectory control, te sɛ robot joints ne sorting equipment.
5). Nkabom ne sɛnea ɛnyɛ den sɛ wɔde bedi dwuma
Mfonini dodow no ara wɔ motors, reducers, ne encoders a wɔaka abom, na wɔn a wɔde di dwuma no betumi de kar no tẽẽ denam control systems te sɛ PLCs ne motion controllers so, na ama mfiri nkɔso nhyehyɛe no ayɛ mmerɛw.
Ɛha, Wɔ krataafa yi mu no, yɛde yɛn Hollow rotary tables no categorys kyerɛ tiawa sɛnea edidi so yi,wubetumi ahwɛ nkratafa afoforo mu ama models soronko anaa types nso:
Yɛma wo akwaaba sɛ wobɛhwɛ nnwuma pii anaa kɔ yɛn video gallery a Youtube yɛ: https://www.youtube.com/@tallmanrobotics
|
Aperture akɛseɛ Rotary Tables |
Hypoid Gear Hollow Nneɛma a Ɛkyinkyini |
CAM Roller Hollow Nnua a ɛkyinkyini |
Nneɛma a emu yɛ duru Hollow Rotary Tables |
Dual Lead Worm Gear Tokuru a Ɛkyinkyin pon |
|
|
|
|
|
|





|
Mmeae a Wɔde Di Dwuma |
Nsɛm a Wɔayɛ ho Nhwehwɛmu |
Scenario Ahwehwɛde a Ɛwɔ Hɔ |
Dwumadi a Hollow Rotary Tables yɛ |
|
Automated production line ne pɛpɛɛpɛ nhyiam |
Precision Welding Adwumayɛbea ma Ɛlektrɔnik Nneɛma |
Wɔ welding nhyehyɛe a micro electronic components te sɛ mobile phone camera modules ne sensors, ɛho hia sɛ wɔdannan adwuma no kɔ afã horow pii ma spot welding, bere a kwati cable entanglement (te sɛ welding gun control lines ne signal lines). |
1).Asɛnka agua no ma adwuma no di akɔneaba pɛpɛɛpɛ (a ɛwɔ gyinabea pɛpɛɛpɛ a wɔsan yɛ ± 0.01mm), hwɛ hu sɛ deviation a welding point gyinabea no nnu 0.02mm; 2).Fa welding tuo nhama ne gas paipu no fa mfinimfini through-tokuru no mu na ama mfiri a ɛtwetwe adwene no so atew na ama adwumayɛbea no nhyehyɛe ayɛ mmerɛw; 3).Wɔ ne servo motors yɛ biako na ama woanya low-speed smooth rotation of 0.1℃/s, kwati workpiece wosow bere a welding. |
|
PCB board nhwehwɛmu ne sɔhwɛ mfiri |
Ɛsɛ sɛ wɔdannan PCB board no digrii 90 ne digrii 180 wɔ mfiri a wɔde hu nneɛma no mu, sɛnea ɛbɛyɛ a mfoninitwa afiri no betumi ahu solder nkwaa ne ɔmansin mu sintɔ ahorow afi afã horow. |
1).Ntɛm ara sesa PCB board angles (rotation mmuae bere<0.5s) to improve detection efficiency; 2).Mfinimfini through-hole no gye probe cables wɔ PCB board no ase sɛnea ɛbɛyɛ a wɔbɛkwati detection mfomso a efi cable twetwe mu ba; 3).The high rigidity design hwɛ hu sɛ PCB board no nni offset biara bere a rotation (flatness mfomso<0.05mm). |
|
|
Robotics Mfiridwuma ne End effectors |
SCARA robɔt boaboa nkwaa ano |
Wɔ 3C nneɛma a wɔboaboa ano mu no, ɛsɛ sɛ SCARA robɔt no nya nneyɛe te sɛ screw tightening ne component flipping through end rotation, na ɛsɛ sɛ ɛne workpieces a ɛsono ne tenten hyia. |
1).Sɛ́ Z-axis rotating joint a robɔt no, enya mpɛn pii positioning pɛpɛɛpɛ ± 0.02mm, a edi ahwehwɛde ahorow a pɛpɛɛpɛ nhyiam; 2).The hollow nhyehyɛe ma kwan ma atenten screws ne conduits fa awiei effector, adapting ma nhyiam a workpieces a ɛsono ne tenten; 3).Akyi kanea a ɛba fam (<1 arc minute) ensures no jamming during rotation, improving the consistency of screw tightening. |
|
Robɔt nneɛma a wɔbom yɛ a wɔde hyehyɛ terminal |
Ɛsɛ sɛ robɔt ahorow a wɔbom yɛ aduan ne nnuru a wɔde hyehyɛ nneɛma mu no dannan nneɛma no kɔ ɔkwan pɔtee bi so (te sɛ nkyerɛwde a ɛhwɛ soro) na ɛne nnaka a wɔde kyekyere nneɛma a ɛsono ne kɛse hyia. |
1).Equipped ne visual sensors, ade no akwankyerɛ betumi ayɛ nsakrae denam rotating platform (a angle resolution of 0.01℃) na ama wɔanya pɛpɛɛpɛ sorting; 2).Mfinimfini through-tokuru no hyɛn mframa clamp no trachea ne sensor cable, ma awiei wiring no yɛ mmerɛw; 3).High load capacity (axial load>50kg) boa bere koro mu a wɔde gye nneɛma pii, na ɛma nneɛma a wɔhyehyɛ no tu mpɔn. |
|
|
Pɛpɛɛpɛ mfiri ne laser mfiri |
Laser agyiraehyɛde afiri a ɛkyinkyini adwumayɛ pon |
Sɛ wɔrehyɛ nneɛma a wɔde yɛ adwuma a ɛyɛ kurukuruwa (te sɛ nkuruwa ne bearing ahorow a wɔabɔ ho ban) ani agyirae a, ɛsɛ sɛ adwuma no dannan digrii 360 na ama wɔanya nsusuwii ahorow a ɛkɔ so, na ɛsɛ sɛ wɔkwati sɛ nhama besiw laser hann kwan no kwan. |
1).Drive adwuma no ma ɛkyinkyini wɔ ahoɔhare a ɛkɔ so daa (a pɛpɛɛpɛyɛ ± 1rpm) na ama woahwɛ ahu sɛ laser agyiraehyɛde nkyerɛwde a ɛyɛ mmerɛw na entwa mu; 2).Mfinimfini through-tokuru no ma nsu-cooled tube ne signal line a laser mfiri no fa mu, kwati cable interference ne laser optical kwan; 3).High rigidity tabletop tew vibration bere a workpiece rotation, hwɛ hu sɛ agyiraehyɛde pɛpɛɛpɛ (line trɛw mfomso<0.01mm). |
|
Nea ɛto so anan a ɛkyinkyini pon a ɛwɔ anum axis machining mfinimfini |
Wɔ nkuku ne wimhyɛn afã horow ho dwumadie mu no, ɛhia sɛ mfiri nnwinnadeɛ anum a ɛwɔ axis no tumi twa adwuma afã ahodoɔ pii denam agyan a ɛkyinkyini so, na ɛsɛ sɛ ɛne adwuma atenten (te sɛ agyan ne agyan afã ahodoɔ) hyia. |
1).Sɛ́ nea ɛto so anan axis rotary pon no, enya multi angle cutting of workpieces (positioning pɛpɛɛpɛ ± 5 arc seconds) na ɛtew dodow a clamping mmere so; 2).Large aperture hollow design (>100mm) ma kwan ma adwumayɛbea atenten a ɛyɛ ahinanan fa pon a ɛkyinkyini no so, na ɛkwati sɛ ɛbɛtwetwe adwuma no ne nnwinnade no ntam; 3).Wɔayɛ no sɛnea ɛbɛyɛ a ebetumi agyina ɔhyew a ɛkorɔn ne nea ɛba fam ano (-10℃~60℃) sɛnea ɛbɛyɛ a ɛbɛsakra ne nsunsuanso a coolant ne nneɛma a asɛe wɔ processing tebea mu. |
|
|
Aduruyɛ ne aduruyɛdan mu nnwinnade |
Aduruyɛ mu mfoninitwa CT scanner stage |
Bere a wɔreyɛ CT scan no, ɛsɛ sɛ ɔyarefo anaa nhwɛsode no di akɔneaba wɔ ahoɔhare a ɛkɔ so daa mu, bere a wɔkwati sɛ motor nhama ne sensor nhama besiw beae a wɔreyɛ nhwehwɛmu no kwan no. |
1).Low wosow rotation (wosow dodow<0.01mm) ensures that the scanned image is free of ghosting; 2).Mfinimfini through-tokuru no ma nipadua mu nhwehwɛmu nhama (te sɛ ECG ne mogya mu oxygen nhama) wɔ ɔyarefo no nipadua ase, na ɛma ɔyarefo no ahotɔ yɛ kɛse; 3).The absolute encoder no de real-bere feedback ma wɔ rotation angle no so de hwɛ hu sɛ ɛne scanned mfomso gyinabea no hyia pɛpɛɛpɛ. |
|
Biochemical nhwɛsode detection automatic turntable |
Wɔ enzyme-linked immunosorbent assay (ELISA) ne PCR mfiri mu no, ɛsɛ sɛ wɔdannan sample tubes pii kɔ detection station no so na ama wɔanya batch detection, na ɛho hia sɛ wɔkwati sɛ wɔbɛkyere sample tubes ne equipment cables ntam. |
1).Indexing rotation a ɛyɛ pɛpɛɛpɛ (indexing mfomso<0.1mm) to ensure that the sample tube is aligned with the detection light path; 2)Hollow nhyehyɛe penetrates tumi hama ne ɔhyew control cable a sɔhwɛ tube ɔhyew module, simplifying emu nhyehyɛe a mfiri no; 3).Low dede nhyehyɛe (adwumayɛ dede<50dB) to meet the requirements of quiet laboratory environment. |
|
|
Nneɛma a Wɔde Gu Nneɛma Mu ne Nneɛma a Wɔde Kɔma Nneɛma a Wɔhyehyɛ |
Ahoɔhare kɛse labelling afiri gyinabea rotary pon |
Sɛ wɔrekyerɛw anonne ne nnuru a wɔde yɛ ahosiesie nkotoku a, ɛsɛ sɛ toa no dannan pɛnkoro ma ɛne nea wɔakyerɛw so no hyia na ɛne nkotoku a ɛsono ne kɛse hyia. |
1).High speed rotation (maximum speed>300rpm) matches the production line rhythm, capable of processing>10000 nkotoku dɔnhwerew biara; 2)Pneumatic push rod anaa sensor wire a ɛhyɛn toa no mu fa mfinimfini through-tokuru no mu no ne nkotoku a ɛsono ne sorokɔ hyia; 3).Ntɛm ara fi ase gyae mmuae (acceleration bere<0.2s) reduces the shaking of the bottle during switching and avoids label wrinkling. |
|
Logistics package sorting dannan afiri |
Wɔ intelligent logistics sorting center no, ɛsɛ sɛ wɔdannan package no kɔ sorting gate akwankyerɛ a ɛne no hyia no so (te sɛ 90℃, 180℃) na wogyina package no mu duru nkɛntɛnso ano. |
1).High axial load design (>200kg) tumi gyina nkɛntɛnso a package hwe ase a enni deformation; 2)Hollow nhyehyɛe no gye conveyor belt drive shaft ne gyinabea sensor cable a sorting line no; 3).Wɔ ne aniwa nhyehyɛe no nyɛ adwuma bom de siesie akwan a ɛkyinkyini no wɔ bere ankasa-mu (mmuae a ɛkyɛ<10ms), improving sorting accuracy. |
Ahwehwɛde a Wɔtaa hwehwɛ wɔ Akwammisa Nsɛm Ho Nsɛm a Wɔaboaboa Ano
Efi atifi hɔ asɛm no mu no, yebetumi ahu sɛ bo titiriw a ɛwɔ asɛnka agua a ɛkyinkyini a ɛwɔ tokuru no mu no ayɛ kɛse wɔ afã abiɛsa mu:
1).. Siesie ɛyaw a ɛwɔ "through-hole" mu: yi ahunmu ntwitwiridii a ɛda nhama ne adwumayɛbea ahorow ntam no fi hɔ denam mfinimfini through-tokuru no so, ma nnwinnade nhyehyɛe nyɛ mmerɛw;
2).. Hwɛ sɛ pɛpɛɛpɛ kankyee: High pɛpɛɛpɛ gyinabea ne low backlight di pɛpɛɛpɛyɛ ahwehwɛde ma nhyiam, nhwehwɛmu, ne dwumadie;
3).. Adapt to complex loads: High rigidity ne adesoa tumi a wode begyina adwumayɛ tebea te sɛ adwumayɛbea mu duru, impact, anaa vibration ano.
Saa su ahorow yi ma ɛyɛ ade titiriw a wontumi nsi ananmu wɔ nnwuma te sɛ automation, precision manufacturing, ne healthcare mu, na ɛma nnwinnade no nkabom ne adwumayɛ mu ahotoso tu mpɔn kɛse.
Dɛn na ɛsɛ sɛ yɛhyɛ no nsow bere a yɛrepaw Hollow rotary tables no?
1).Load parameters: Paw model a ɛfata a egyina ankasa axial / radial adesoa ne ahoɔhare ahwehwɛde ahorow so na kwati overloading ka ɔsom nkwa.
2)Through-hole size: Hwɛ sɛ mfinimfini aperture no sõ sen diameter a cable anaa adwuma ade a ɛfa mu, gyaw margin pɔtee bi.
3).Accuracy ahwehwɛde: Paw transmission type (gear type vs harmonic type) a egyina ahwehwɛde ahorow a ɛfa mpɛn pii positioning pɛpɛɛpɛ, backlight, ne resolution.
4).Control Interface: Si so dua sɛ motor type (servo/stepper) ne control system no hyia, ne sɛ ebia ɛboa pulse control anaa bus control (te sɛ EtherCAT).
5).Atwa yɛn ho ahyia nsakrae: Paw ahobammɔ gyinabea (te sɛ IP54, IP65) a egyina adwumayɛbea (ɔhyew, ɔhyew, mfutuma).
Hollow rotary tables, a ɛyɛ pɛpɛɛpɛ kɛse, ɛyɛ den kɛse, ne hollow design soronko no abɛyɛ ade titiriw a ɛma wonya rotational motion pɛpɛɛpɛ wɔ nnɛyi automation mfiri mu, na ɛma mfiri no nkabom ne adwumayɛ mu mmɔdenbɔ tu mpɔn kɛse.










Tags a ɛyɛ hyew .: hollow rotary tables, China tokuru rotary pon a wɔyɛ, wɔn a wɔde ma, adwumayɛbea


